
當前位置: CompoTech China > 關鍵技術和應用 >
內容概覽
本文介紹了向軟件定義車輛的過渡,以及向電動/電子 (E/E) 區域架構的遷移如何解決配電、傳感器和傳動器以及數據通信方面的難題。
1配電挑戰和解決方案
了解新區域架構對汽車配電的影響。
2智能傳感器和傳動器的挑戰和解決方案
了解物理和邏輯 IO 功能的分離以及對傳感器和傳動器的影響。
3數據挑戰和解決方案
了解在保持通信安全的情況下所需的數據類型組合及其共存性。
引言
在過去幾十年中,電子產品在汽車系統創新中發揮了關鍵作用。新的半導體器件與新穎的特性相結合,增強了汽車機械系統提供的功能。
雖然半導體解決方案和電子產品在汽車電子產品中繼續發揮關鍵作用,但展望未來,汽車創新的更明顯特征將是軟件創新和整合。軟件架構的這種變化是通過開發相關硬件和半導體解決方案來實現的。
克服 E/E 架構挑戰
當今的 E/E 架構主要采用域架構來組織電子控制單元 (ECU),并將電纜連接到特定的域(如動力總成域)。相比之下,區域架構會根據域功能在汽車內部的位置或區域,對多個甚至全部域功能進行分組。
圖 1 展示了對車輛功能進行分組的域和區域方法,而圖 2 展示了區域架構的更詳細視圖,其中包含稱為車輛計算的中央計算節點。
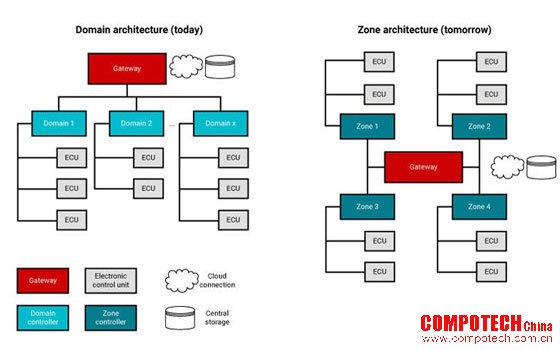
圖 1. 域架構與區域架構。
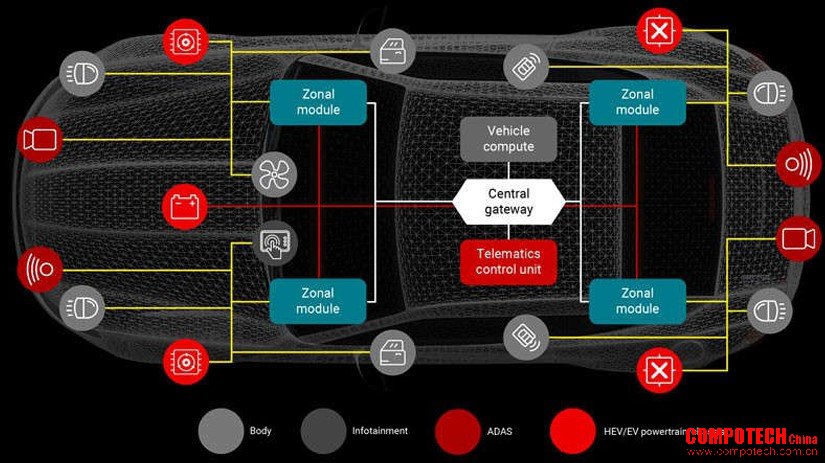
圖 2. 汽車中的典型區域架構,其中顯示了傳感器、傳動器、區域模塊和中央計算節點。
這種從域架構到區域架構的轉換將有助于使傳感器和傳動器與中央車輛計算節點保持獨立。換言之,硬件和軟件更新周期可以不同,傳感器和傳動器設計可以用于更多個車輛設計周期。此外,區域架構還將減少 ECU 數量和電纜長度,從而簡化車輛架構和相關的系統驗證工作。
區域架構讓 OEM 有更大控制權,包括通過無線更新進行高級軟件維護;固件無線 (FOTA) 更新以及始終開啟的云連接,從而實現新功能并改進自動駕駛等功能。這還將使 OEM 能夠遷移到基于服務的軟件結構,例如將實時控制環路轉移到區域模塊。此外,區域模塊可實現更優化的配電拓撲(包括關閉未使用模塊的電源),這對于電池電動車輛和混合動力電動車輛尤其有利。
盡管利用區域架構有可能實現巨大改進,但在配電、傳感器和傳動器以及數據平面拓撲方面仍存在挑戰。配電將使用區域模塊中的智能保險絲從集中式部署過渡到分散式部署。傳感器和傳動器將變得智能。某些功能(包括控制環路)將移至區域模塊,以便增加基于服務的通信,減少基于信號的通信。最后,數據通信將通過速度更高的網絡進行,新的物理層 (PHY) 傳輸各種數據類型。
配電挑戰和解決方案
蓄電池必須為分布在車輛上的大多數 ECU 供電。在域架構中,由熔斷型保險絲和繼電器組成的配電盒進行這種配電,如圖 3 所示。
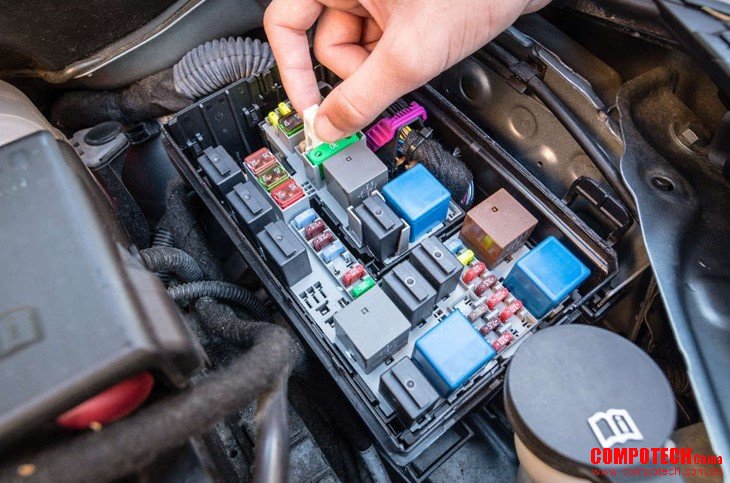
圖 3. 一個典型的配電盒,此配電盒具有熔斷型保險絲和機械繼電器。
配電盒中的熔斷型保險絲具有不同的時間-電流特性 (TCC),以便支持汽車中不同類型的線束和負載。該盒位于車輛中一個可觸及的位置,方便輕松更換保險絲。
雖然圖 3 顯示配電盒中沒有半導體器件,但 OEM 正在使用半導體器件升級這些配電盒;繼電器被半導體高側開關取代,輸入/輸出控制線路被控制器局域網 (CAN) 和本地互連網絡 (LIN) 收發器等通信接口取代。
使用基于半導體的配電盒的原因有多個方面:增強診斷、故障保護、可復位保險絲、小尺寸設計和減輕線束重量。隨著 OEM 部署區域架構,系統設計人員正在重新思考配電問題,并考慮兩個額外的注意事項:配電分散化以及用半導體保險絲代替熔斷型保險絲。
配電分散化
區域架構使用區域網關將數據分發到區域中的智能傳感器、傳動器和 ECU,并整合數據以用于與中央計算模塊進行通信。這些區域數據網關還可以為該區域中的模塊分配電力。例如,如果將單個電源線束從電池鋪設到區域,則該區域中的區域模塊將向該區域中的模塊分配電力。圖 2 也闡明了這一概念,其中區域模塊向該區域中的模塊分配電力。也就是說,區域模塊包括分配電力所需的相關保險絲和繼電器。
與集中式配電所需的線束長度相比,這種配電方法的優勢在于,從電池到每個區域的電源線束長度會縮短。這會直接轉化為更低的重量和成本。
分散式配電的挑戰之一是設計能在任何區域工作的配電箱,而不管該區域的負載如何,這種配電箱不僅有助于降低設計成本,還可以減輕庫存管理。通過使用包括半導體微控制器 (MCU)、高側開關和收發器在內的智能配電盒,可以使用軟件來配置硬件以匹配該區域中的負載。
用半導體保險絲替代熔斷型保險絲
標準熔斷型保險絲會在遇到大電流時熔斷,以此中斷電流流動。圖 4 中顯示的 TCC 曲線描述了這種熔斷行為。
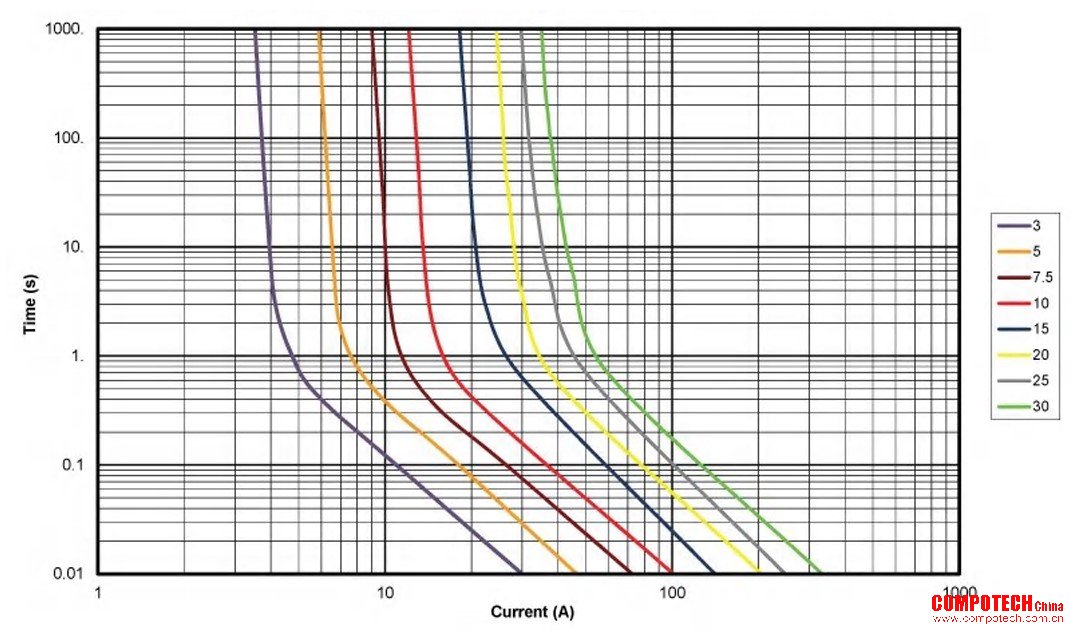
圖 4. Littlefuse 微保險絲的 TCC 曲線。
許多因素都會影響保險絲特性,例如接觸電阻、空氣溫度和電流瞬變。由于這些因素,系統設計人員會根據標稱工作電流、工作溫度范圍、浪涌電流和電流瞬態形狀來降低保險絲的標稱熔點 I2t(安培平方秒)額定值。例如,將保險絲的額定電流降低 25% 可防止保險絲出現干擾性熔斷。
選擇基于保險絲的降額電流意味著線束中的電流會根據保險絲的溫度條件而變化。線束設計人員可能必須選擇不太理想的線束測量儀表,以便在特定溫度條件下傳遞保險絲允許的更高電流。
進一步優化線束的一種方法是使用具有 I2t 特性的半導體高側開關集成電路 (IC)。典型的高側開關具有過流保護功能;也就是說,當電流超過特定閾值時,高側開關會鉗制電流或自行打開,從而保護下游線束和負載。通過向高側開關添加 I2t 特性,開關會根據流經的電流(更具體地說是電流的平方)在不同的時間打開。使用基于 I2t 的半導體高側開關可減少保險絲特性的變化,從而實現更優化的線束測量儀表,這有助于進一步減輕線束的重量。
智能傳感器和傳動器的挑戰和解決方案
區域 E/E 架構會顯著影響車輛邊界(即所謂的邊緣)的感應和驅動功能。在域架構中,通常由靠近傳感器或傳動器的專用 ECU 執行這些功能。新特性和功能通常會產生新的 ECU,每個 ECU 都具有專用的電池電源和網絡線路,從而進一步增加線束的復雜性。通過將多個 ECU 的邏輯輸入/輸出 (I/O) 功能合并到區域模塊中,并保持傳感器和傳動器的位置,引入區域模塊可以極大地降低線束的復雜性。這會將物理和邏輯 I/O 功能分離開,如圖 5 所示,從而帶來了新的挑戰并需要新的解決方案。
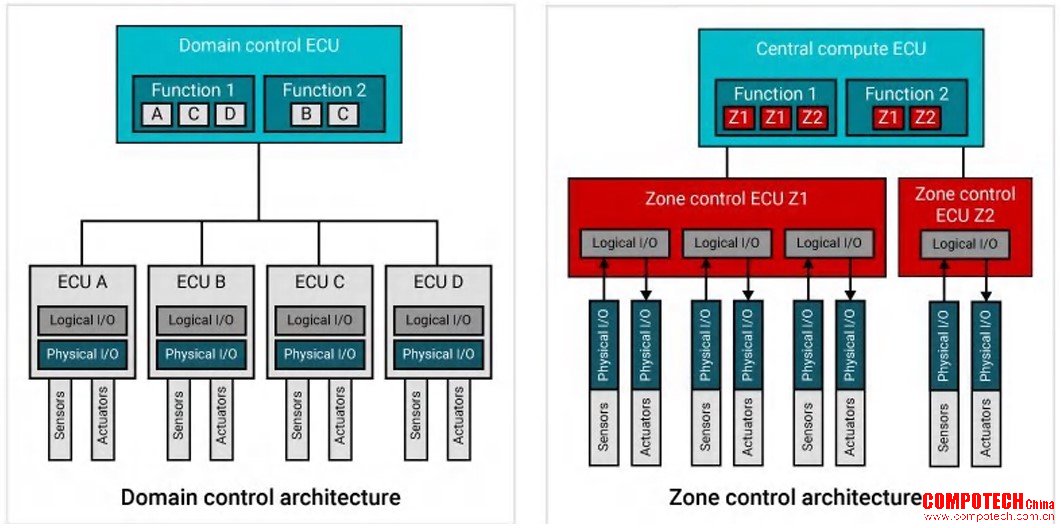
圖 5. 邏輯與物理 I/O 功能的分離有助于從域架構過渡到區域架構。
區域模塊 – 新的微控制器要求
在單個區域模塊中集成不同的邏輯 I/O 功能(包括控制環路),意味著該模塊要滿足每個 I/O 功能的各項要求,從而產生這些針對 MCU 的特定要求:
• 高實時性能
• 大量的程序和數據存儲器
• 通過虛擬化為具有不同汽車安全完整性級別的功能提供混合重要性支持
• 面向主干的高速通信接口
• 多個低端通信外設(例如 CAN FD 或 LIN)實例,用于連接智能傳感器和執行器
為了滿足這一多樣化的要求,MCU 需要支持區域模塊驅動的要求。同時,TI 提供具有足夠實時功能的異構片上系統 (SoC),例如 DRA821 或 AM2x 嵌入式處理器,此類 SoC 可以在經過優化的區域 MCU 推出之前彌合這一差距。
智能傳感器和執行器
邏輯和物理 I/O 功能的分離會影響傳感器和執行器。專為調節傳感器信號和驅動執行器設計的 IC 需要增強局部智能和通信功能。局部智能可保持電路狀態,并可運行后臺診斷以檢測傳感器或執行器故障。集成的通信接口至少包括一個協議處理程序(例如 LIN 響應器實現),或者更簡單版本的 CAN FD 數據鏈路層,例如 CAN FD Light,它旨在消除邊緣節點中對 MCU 的需求。此類集成將使智能 IC 能夠自主控制傳感器或執行器,并創建一個成本和尺寸經過優化的解決方案,該解決方案可集成到傳感器或執行器外殼中,如圖 6 (a) 所示。
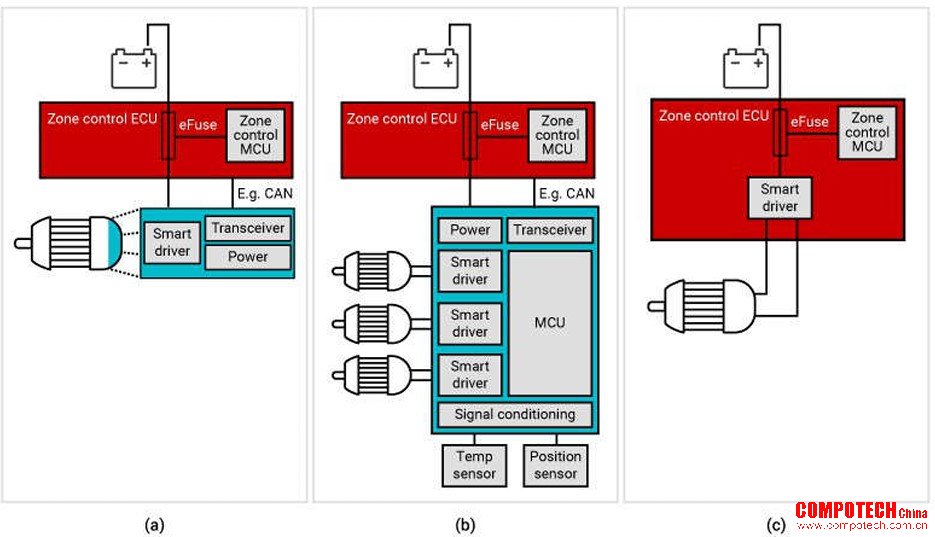
圖 6. 驅動器實現示例:集成在封閉外殼中的智能驅動器 (a);用于復合執行器解決方案的小型 ECU (b);通過區域模塊控制的簡單執行器 (c)。
對于更復雜的傳感器(例如雷達衛星)或復合執行器(例如具有各種電機的座椅控制單元),基于小型 ECU 的經典方法可能仍然是極其高效的解決方案(請參閱圖 6 (b))。此外,區域模塊的專用信號線(請參閱 圖 6 (c))可以直接控制非常簡單的傳感器或執行器。
根據控制和感應信號的數量、傳感器和執行器復雜性以及安裝限制等方面的因素,設計人員可以選擇這些解決方案中的任何一種。此外,CAN 局部聯網等通信協議可以通過選擇性地僅在需要時喚醒 MCU,使其在更長時間內保持低功耗模式,從而減少執行器模塊的功耗。
數據挑戰和解決方案
區域拓撲需要更加注重網絡連接;因此,外設組件快速互連 (PCIe)、CAN XL 和千兆位以太網等高帶寬接口的發展勢頭強勁。正確的物理層 (PHY) 可以滿足帶寬要求。
圖 7 是一個典型區域模塊的方框圖,其中包含高速通信鏈路。鑒于不同的吞吐量需求,以及為了向區域模塊和中央計算之間的流量組合提供帶寬,千兆位以太網和 PCIe 或 CAN XL 可能至關重要。在多種情況下,為遠距離電纜連接部署 PCIe 重定時器或轉接驅動器器件是有利的。CAN XL 能夠與現有 CAN 網絡兼容,同時無需更復雜的組網軟件即可提供高達 20Mbps 的速度。對于與傳感器和執行器之間的區域模塊連接,可能需要帶寬要求更低,因此成本更低的總線系統(例如 LIN)。業界普遍的做法是提供一條具有標準化軟件控制功能的標準化總線,以采用一種完全基于服務和軟件的方法。
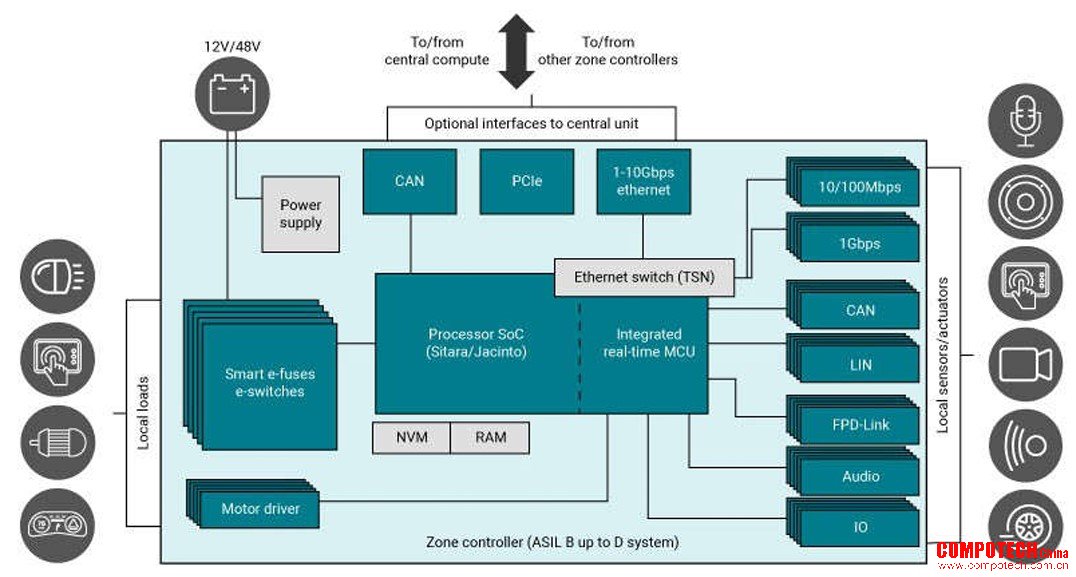
圖 7. 具有通信接口的區域模塊方框圖。
為了使所有鏈路都適應未來需求,網絡拓撲可保障備用帶寬,尤其是區域模塊和中央計算之間的備用帶寬,從而在維護現有和已驗證硬件的同時實現軟件升級。
數據類型
面向未來還意味著實現完全自主駕駛(最高 5 級);因此,該架構包括可用性、彈性和安全標準。實現數據通信彈性和結構冗余的一種方法是通過環形拓撲,實現多播協議和數據有效性檢查。
在軟件方面,分布式區域拓撲必須處理差異很大的數據包類型組合,以適應從簡短控制消息到高吞吐量傳感器和信息娛樂數據的各種數據。此外,所有這些流量類型在延遲、抖動、同步和錯誤率要求方面都不盡相同。簡而言之,它們的服務質量 (QoS) 需求各不相同。
數據的時間敏感性
為了適應不同的延遲或 QoS 要求,基于以太網的時間敏感型網絡 (TSN) 是一個不錯的選擇,但這種部署需要進行大量微調;較舊的 MCU 和處理器甚至不能在硬件中完全支持此功能。PHY IC 級或開關支持可能會有所幫助,尤其是在時間同步方面。
在許多情況下,在單個 SoC 中集成多個以太網端口可以成為節省布板空間和成本的一大優勢。
對于音頻應用,許多信息娛樂架構已經使用音頻視頻橋接 (AVB),對于這種情況,時間同步非常重要(請參閱技術文章使用時鐘發生器優化適用于汽車應用的 eAVB)。AVB 網絡已經過驗證,但在域架構中部署時,它們不受許多并發問題的影響。隨著向區域架構(該架構將所有類型的數據流量結合在一起)轉移,較新的 TSN 特性變得越來越重要。
表 1 列出了一些可能與區域架構實現相關的電氣電子工程師協會 (IEEE) TSN 標準。有關詳細信息,請參閱白皮書“面向工業自動化的時間敏感型網絡”。

表 1. 適用于汽車實時應用的一些相關 TSN 標準。
對于音頻用例,延遲目標沒有動力總成或底盤控制用例那么嚴格(毫秒與微秒)。但是,即使在通過同一網絡路由大量元數據或配置數據流量或大量 ADAS 傳感器數據時,也不能違反音頻延遲要求 – 不能丟棄數據包。這就是仲裁和微調現有 TSN 參數非常重要的原因。一個眾所周知的參數是時間感知型整形 (TAS),它在 TI 的 Processor SDK 中提供,被稱為調度流量增強 (EST) 分流。無論并行傳輸多少其他數據(如 ADAS 傳感器數據),TAS 都可保障在預定義的時間段后傳輸較低帶寬流量。理想情況下,將 TSN 硬件開關集成在 TI 的處理器(如 DRA821)中,可提供全面的軟件靈活性,同時硬件加速器可針對數據包處理以及轉發或主動丟棄數據包提供支持。
通信安全
除延遲和抖動等物理網絡屬性外,區域架構還需要安全的通信路徑。互聯網上常見的基于以太網的攻擊方法和工具很大程度上同樣適用于道路車輛。當汽車網絡受到安全威脅時,無法實現可信的通信,將 I/O 與計算分離的整個概念將不起作用。
出于這些原因,從整體上探討網絡安全主題非常重要。除了數據完整性、真實性和機密性這些核心功能外,整個產品開發和生命周期還離不開安全意識和文化。與國際標準化組織 (ISO) 26262 功能安全標準類似,ISO/汽車工程師協會 ISO/SAE 21434 是汽車網絡安全工程的新標準。此外,聯合國歐洲經濟委員會頒布了兩項新條例,規定如何管理車輛網絡安全風險,以及如何檢測和應對車隊中的安全事件。
不可能簡單地針對如此多樣的數據類型增加安全性;通信效率同樣至關重要。使用 IPsec 保護互聯網協議數據包的經典方法適用于消耗較少網絡帶寬的控制和傳感器數據。要流式傳輸音頻數據或視覺/雷達傳感器數據,需要連續的互聯網協議數據包流,至少要通過身份驗證來確保這些數據包的安全。但在軟件中執行此操作會導致大量開銷,消耗重要的處理器資源。
克服瓶頸需要新的更低級別加密和身份驗證。MACsec 就是一個示例,它可以應用于以太網協議的 1 級或 2 級,并集成到以太網媒體訪問控制 IP 或以太網 PHY 中,以進行線速身份驗證和/或負載加密。
結語
區域架構要求需要新的解決方案來克服配電、傳感器和執行器以及數據通信方面的挑戰。
通過向分散式智能保險絲過渡、更多地使用智能執行器和傳感器,以及支持非常分散的數據類型組合的更高帶寬接口,或許能解決區域架構實現中明顯的設計問題。這些解決方案不會同時出現,而是在不斷地發展演變,并隨著時間的推移在商機成熟時引入變化,盡可能降低因太早推出而被束之高閣的風險。車身域及其許多分布式執行器和傳感器 ECU 將是最先移至區域架構的一些域。將 ADAS 或動力總成和底盤控制轉換到區域架構可能尚需時日。
區域架構的最終目標是完全實現軟件定義的車輛,即,將傳感器、執行器、區域模塊和數據鏈路的理想標準化組件組合在一起。考慮到這一目標,許多不同領域中的各種創意正在以整體方式進行整合,從而在未來幾十年實現基于軟件的創新。
本月熱點 HOME




